Akıllı Kapı Kilidi +Rf + Web Control – ( Smart Door Locks )
Merhaba,
Bu yazımızda evde akıllı kapı kilidi nasıl yapılır buna değineceğiz. Piyasada hali hazırda satılan akıllı kapı kilitleri fahiş rakamlara satılmakta, ayrıca kumanda ve diğer istekler için ekstra ücretler istenmekte. Üstelik her kapıya da uyum sağlamamaktadır.
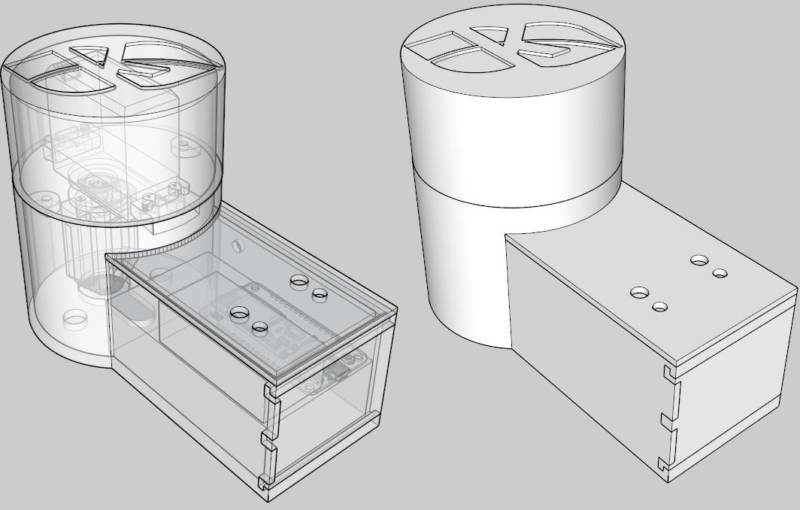
Bu proje; ev, işyeri, her türlü kapı ve para kasaları vb. yerlere takılarak kullanılabilir. (uyarlanabilir.) İster kumanda, ister cep telefonu veya ofisinizden bilgisayarla kontrol edebilirsiniz. Evde yokken kapınıza gelen misafire kapıyı açabilir, anahtarı unuttuğunuzda cep telefonunuzu anahtara çevirerek teknolojinin nimetinden faydalanabilirsiniz.
Projemi yaklaşık 150 -200 tl civarı bir maliyetle hem isteğime uygun hem daha gelişmiş bir sistem kurarak sizler ile paylaşıyorum.
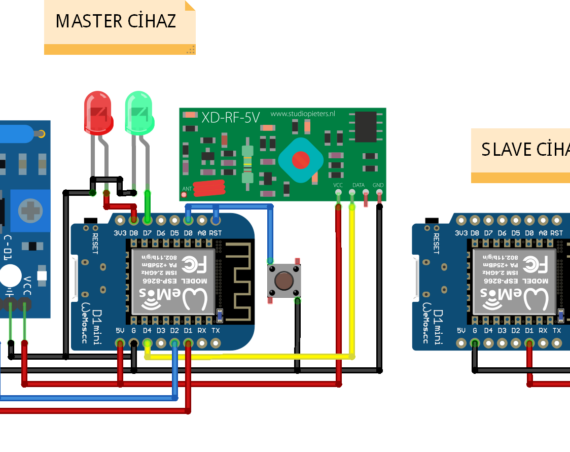
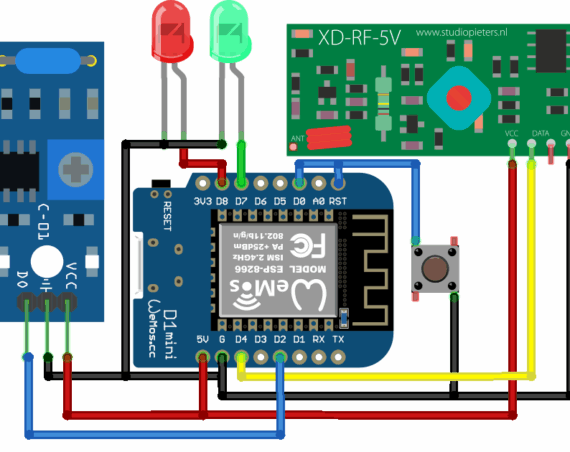
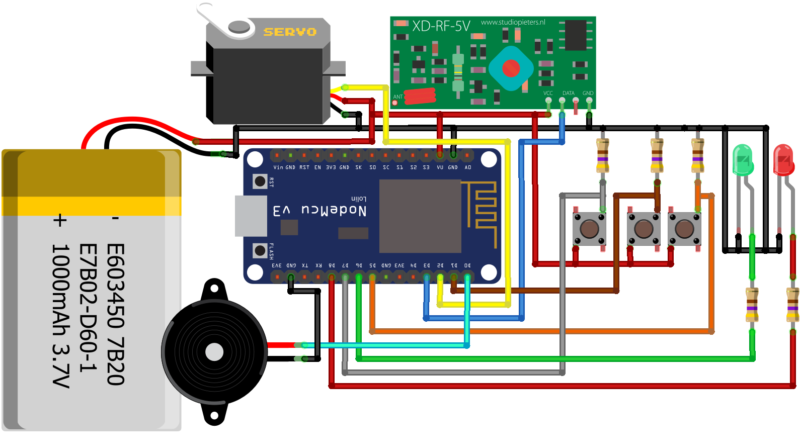
DEVRE ŞEMASI
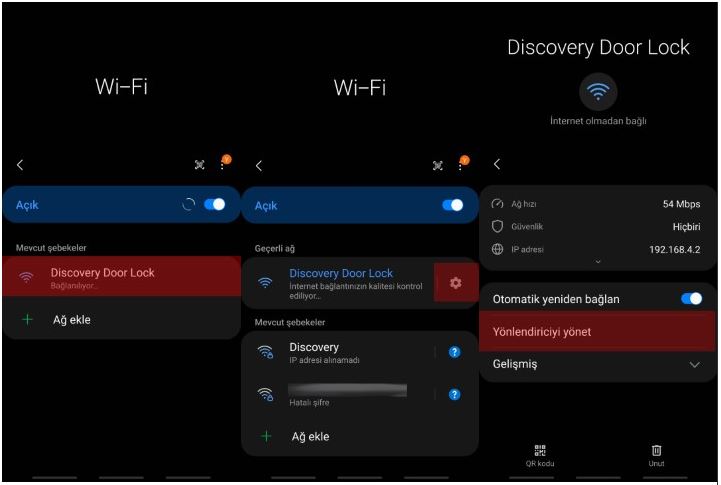
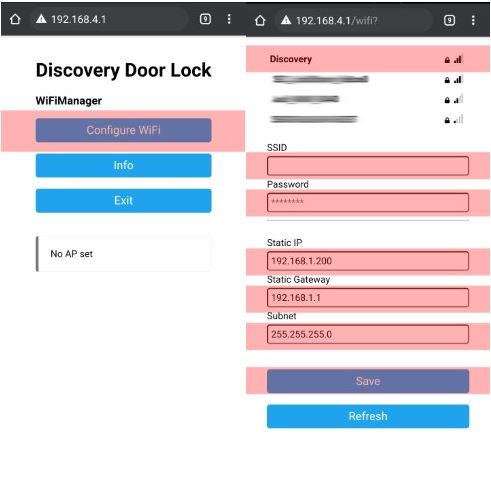
Projenin İlk Çalışma Ayarları
Proje reset düğmesine basıldığında da yine aşağıdaki gibi cihaz internet bağlantısı için SSD ve Şifre bilgilerini seçerek cihazın alacağı ip adresini belirlemeniz gerekmektedir.
Proje Kodları
/*
Name: Discovery Door Lock.ino
Created: 22/02/2021 23:51:11 AM
Author: Adem KIRMIZIYÜZ
*/
// Bütün Kütüphaneler ekleniyor
#include <DNSServer.h>
#include <ESP8266WiFi.h> //https://github.com/esp8266/Arduino
#include <ESP8266WebServer.h>
#include <WiFiManager.h> // https://github.com/tzapu/WiFiManager
#include <Servo.h>
#include <RCSwitch.h>
#include <EEPROM.h>
#define EEPROM_SIZE 1
RCSwitch mySwitch = RCSwitch();
WiFiServer server(80);
Servo myservo;
int buttonState;// EEPROM a kaydedeceğimiz buton durumu.
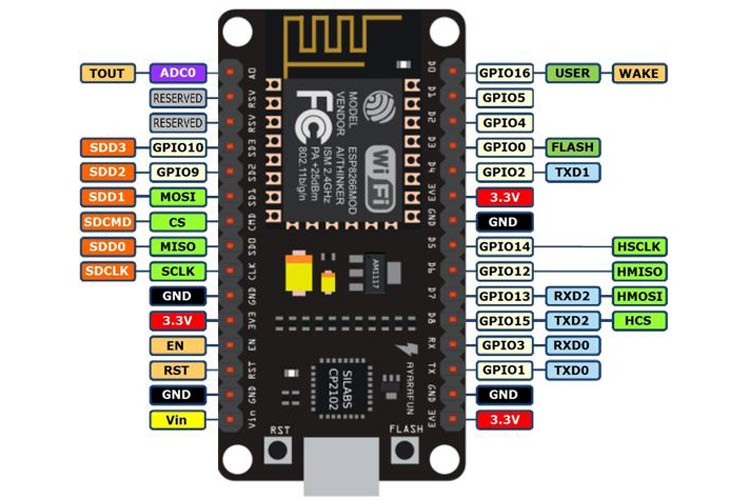
// Pinler
const int openButton = 5; // D1
const int closeButton = 14; // D5
const int closeLed = 12; // D6
const int resetButton = 13; // D7
const int openLed = 15; // D8
int buzzerPin = A0; //D0
void setup() {
Serial.begin(115200);
pinMode(buzzerPin, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
//Pin modlarını ayarlayan method çağrılıyor
initPinModes();
// Wireless bağlantı ayarlarını yapan method
initWireless();
EEPROM.begin(EEPROM_SIZE);
buttonState = EEPROM.read(0);// Buton durumunu EEPROM a kaydediyoruz.
Serial.println("İlk Açılış");
Serial.println(EEPROM.read(0));
mySwitch.enableReceive(0); // D3
delay(2500);
}
void loop()
{
buttonControl();
htmlControl();
rfControl();
}
void initWireless()
{
// WiFiManager
WiFiManager wifiManager;
wifiManager.setSTAStaticIPConfig(IPAddress(192, 168, 1, 200), IPAddress(192, 168, 1, 1), IPAddress(255, 255, 255, 0));
wifiManager.autoConnect("Discovery Door Lock");
Serial.println("Connected.");
server.begin();
}
// Pin modlarını ayarlayan method
void initPinModes()
{
Serial.begin(115200);
pinMode(openLed, OUTPUT);
pinMode(closeLed, OUTPUT);
pinMode(openButton, INPUT_PULLUP);
pinMode(closeButton, INPUT_PULLUP);
pinMode(resetButton, INPUT_PULLUP);
}
void htmlControl() {
// bir clien istemci baglı olup olmadığını kontrol ediyoruz
WiFiClient client = server.available();
if (!client) {
return;
}
// client ın bir data gondermesini bekliyoruz
Serial.println("new client");
while (!client.available()) {
delay(1);
}
// gelen istekleri okuyoruz
String request = client.readStringUntil('\r');
Serial.println(request);
client.flush();
if ((request.indexOf("/KAPI-KAPALI") != -1 ) && (buttonState == 0))
{
Serial.println("Web Kapanış");
Kapi_Kapat();
}
if ((request.indexOf("/KAPI-ACIK") != -1 ) && (buttonState == 1))
{
Serial.println("Web Açılış");
Kapi_Ac();
}
// bu kısımda html kodlarını internet arayüzüne yazıdırıyoruz.
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("");
client.println("<!DOCTYPE html><html lang='tr'><head><meta charset='utf-8'><meta name='viewport' content='width=device-width, initial-scale=1,shrink-to-fit=no'>");
client.println("<!-- Bootstrap CSS -->");
client.println("<link rel='stylesheet' href='https://maxcdn.bootstrapcdn.com/bootstrap/4.0.0-alpha.6/css/bootstrap.min.css' integrity='sha384-rwoIResjU2yc3z8GV/NPeZWAv56rSmLldC3R/AZzGRnGxQQKnKkoFVhFQhNUwEyJ' crossorigin='anonymous'>");
client.println("<meta http-equiv='refresh' content='3; URL=http://192.168.1.200/'></head>");
client.println("<body>");
client.println("<div class='container mt-2'>");
client.println("<div class='row'>");
client.println("<div class='col-sm-12'>");
client.println("<div class='card'>");
client.println("<div class='card-header'>");
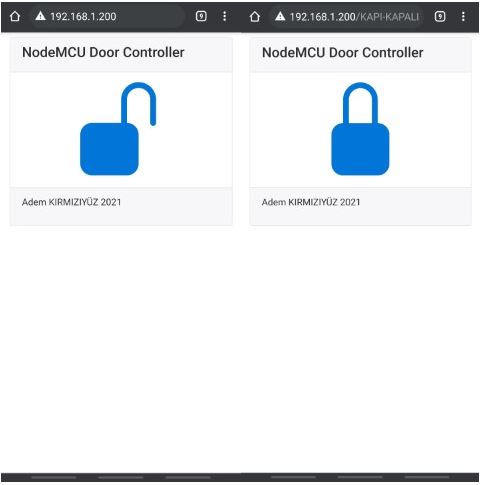
client.println("<h4>NodeMCU Door Controller</h4>");
client.println("</div>");
client.println("<div class='card-body'>");
client.println("<div class='table-responsive'>");
client.println("<thead>");
client.println("</thead>");
client.println("<tbody>");
client.println("<table width='10%' height='10%' border='0' cellspacing='1' cellpadding='1'align='center'><tr>");
client.println("<td class='align-center'>");
if (buttonState == 0)
{
client.println("<a href=\"/KAPI-KAPALI\"\"><div class='d-flex align-items-center rounded float-center p-3 py-2 mb-1 bg-light rounded' style='font-size: 10em'><svg x='10' class='bi bi-unlock-fill' width='1em' height='1em' viewBox='0 0 16 16' fill='currentColor' xmlns='http://www.w3.org/2000/svg'><path d='M11 1a2 2 0 0 0-2 2v4a2 2 0 0 1 2 2v5a2 2 0 0 1-2 2H3a2 2 0 0 1-2-2V9a2 2 0 0 1 2-2h5V3a3 3 0 0 1 6 0v4a.5.5 0 0 1-1 0V3a2 2 0 0 0-2-2z'></path></svg></div></a>");
buttonState == 1;
}
else if (buttonState == 1)
{
client.println("<a href=\"/KAPI-ACIK\"\"><div class='d-flex align-items-center rounded float-center p-3 py-2 mb-1 bg-light rounded' style='font-size: 10em'><svg class='bi bi-lock-fill' width='1em' height='1em' viewBox='0 0 16 16' fill='currentColor' xmlns='http://www.w3.org/2000/svg'><path d='M8 1a2 2 0 0 1 2 2v4H6V3a2 2 0 0 1 2-2zm3 6V3a3 3 0 0 0-6 0v4a2 2 0 0 0-2 2v5a2 2 0 0 0 2 2h6a2 2 0 0 0 2-2V9a2 2 0 0 0-2-2z'></path></svg></div></a>");
buttonState == 0;
}
client.println("</td>");
client.println("</tr>");
client.println("</table>");
client.println("</tbody>");
client.println("</div>");
client.println("</div>");
client.println("<div class='card-footer'>");
client.println("<div class='form-group float-left'>Adem KIRMIZIYÜZ 2021</div>");
client.println("</div>");
client.println("</div>");
client.println("</body>");
client.println("</html>");
delay(1);
Serial.println("Client disonnected");
Serial.println("");
}
void buttonControl() {
if ((digitalRead(closeButton) == HIGH) && (buttonState == 0))
{
Serial.println("Buton Kapanış");
Kapi_Kapat();
}
if ((digitalRead(openButton) == HIGH) && (buttonState == 1))
{
Serial.println("Buton Açılış");
Kapi_Ac();
}
if (digitalRead(resetButton) == HIGH)
{
Serial.println("Ayarlar Silindi");
digitalWrite(closeLed, HIGH);
digitalWrite(openLed, HIGH);
ESP.eraseConfig();
delay(3500);
digitalWrite(closeLed, LOW);
digitalWrite(openLed, LOW);
EEPROM.write(0, 0);
EEPROM.commit();
ESP.restart();
}
}
void rfControl()
{
int value = mySwitch.getReceivedValue();
if (mySwitch.available()) {
if ((value == 14244580) && (buttonState == 1))
{
Serial.println("rf Açılış");
Kapi_Ac();
delay(1500);
}
if ((value == 14244577) && (buttonState == 0))
{
Serial.println("rf Kapanış");
Kapi_Kapat();
delay(1500);
}
else
{
Serial.print("İşlem Tekrarı. ");
Serial.println(mySwitch.getReceivedValue());
};
mySwitch.resetAvailable();
}
}
void Kapi_Kapat()
{
WiFiClient client = server.available();
digitalWrite(openLed, HIGH);
for (int i = 0; i < 2; i++) // Buzzer için 2 defa dönülüyor
{
digitalWrite(buzzerPin, HIGH); // Buzzer açılıyor
delay(200); // 0.2 sn bekleniyor
digitalWrite(buzzerPin, LOW); // Buzzer kapatılıyor
delay(200); // 0.2 sn bekleniyor
}
Serial.println(EEPROM.read(0));
myservo.attach(2);//D2
myservo.write(100);
client.print("POST /KAPI-KAPALI/ HTTP/1.1");
delay(3500);
client.print("POST / HTTP/1.1");
myservo.detach();
buttonState = 1;
EEPROM.write(0, buttonState);
EEPROM.commit();
digitalWrite(openLed, LOW);
}
void Kapi_Ac()
{
digitalWrite(closeLed, HIGH);
WiFiClient client = server.available();
digitalWrite(buzzerPin, HIGH);
delay(200);
digitalWrite(buzzerPin, LOW);
Serial.println(EEPROM.read(0));
myservo.attach(2);//D2
myservo.write(80);
client.print("POST /KAPI-ACIK/ HTTP/1.1");
delay(5000);
myservo.write(91 );
delay(2000);
myservo.attach(2);//D2
myservo.write(100);
delay(60);
myservo.detach();
client.print("POST / HTTP/1.1");
buttonState = 0;
EEPROM.write(0, buttonState);
EEPROM.commit();
digitalWrite(closeLed, LOW);
}MALZEMELER
Motor:
MG996R Yüksek Torklu Servo Motor 180 Derece Metal Dişli x1

Not: Servo içerisindeki potansiyometre sökülerek yerine 2 adet 10k direnç bağlanmalıdır. İki köşeye 10k dirençler bağlanarak orta uçta birleştirilecektir. Ayrıca servo motorun tam tur yapmasını engelleyen çentik kesilmelidir.
Micro Controller (NodeMCU):
NodeMCU LoLin ESP8266 Geliştirme Kartı x1
RF Alıcı Verici:
433 MHz RF Kablosuz Alıcı(Reciver) X1
433 MHz 4 Kanal RF Elcik Kumanda X1

Diğer Elemanlar:
470 Ohm Direnç x5

Push Button x3

Piezo Buzzer x1

Bir miktar kablo

Proje Dosyaları için tıklayınız.